


這個現(xiàn)象的原因,其實是跟激光雷達(dá)、SLAM、路徑規(guī)劃這三者之間的區(qū)別有關(guān)系。
01
首先,激光雷達(dá)本身它只是一個傳感器,或者說它就是機器人的“眼睛”。我們都知道,人的眼睛只負(fù)責(zé)看東西,但是人類對于所見的事物還需要進(jìn)行理解,這個時候就需要人的大腦或者大腦皮層中樞來處理。對機器人來說,有了激光雷達(dá)的數(shù)據(jù)以后,它還需要開發(fā)額外的SLAM算法或者其他能完成地圖構(gòu)建和定位的算法。而有了SLAM的算法以后機器人還不能動,還需要為它編寫路徑規(guī)劃的算法才能自主移動。
所以就有了這樣一個問題,以前三大行業(yè)里會認(rèn)為阻礙機器人發(fā)展的原因是成本問題,影響導(dǎo)航定位的原因也是激光雷達(dá)的成本問題。但是最后會發(fā)現(xiàn),當(dāng)激光雷達(dá)的產(chǎn)品面世之后,時間一長仍然會面臨第二個第三個問題:有了激光雷達(dá)以后怎樣才能進(jìn)行路徑規(guī)劃和SLAM?而這兩點和研發(fā)激光雷達(dá)一樣具有很大的難度。這些難度并不是機器人行業(yè)里的研發(fā)機構(gòu)非常擅長的,因為機器人行業(yè)具有很強的分工性。
我們知道,在機器人領(lǐng)域,有人擅長去做人機交互,有人擅長去做本體,有人擅長去做汽車,有人做機器人,也有像和我一樣去做自主導(dǎo)航定位系統(tǒng)的和激光雷達(dá)。每個人分工不同市場給到的時間是有限的。而怎么在有限的時間去做出一款相對完整的產(chǎn)品呢?強調(diào)的是怎么樣把各自對應(yīng)的優(yōu)勢發(fā)揮出來。單單有一個激光雷達(dá),但是沒有配套的導(dǎo)航定位系統(tǒng),讓廠家從零去開發(fā)SLAM就會有很大的難度。我們的導(dǎo)航定位的產(chǎn)品也是在去年年初才真正推向市場,這也就是為什么導(dǎo)航定位相對來說來得晚一些的原因。
02
那為什么說導(dǎo)航定位這件事情有難度呢?因為這里涉及到很多的細(xì)節(jié),在這里我就不把細(xì)節(jié)一一展開。先給大家講一些比較形象直觀的認(rèn)識。
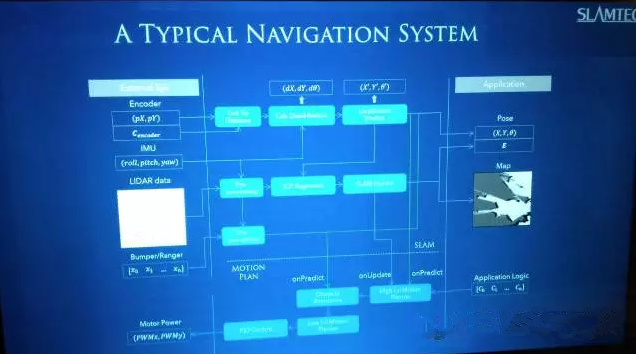
這個就是一個比較典型的導(dǎo)航定位系統(tǒng),其中包含了SLAM、路徑規(guī)劃系統(tǒng)以及和激光雷達(dá)協(xié)作的系統(tǒng)構(gòu)架圖。上圖畫面上可能不是特別清楚,但我的主要目就是想和大家闡述一個觀點:到目前為止SLAM系統(tǒng)還是比較復(fù)雜的。
它的復(fù)雜程度主要體現(xiàn)在幾個方面:
1.算法的完備性。我們也知道目前也有很多開源的算法,比如說像iOS,但是這些算法它處理現(xiàn)實問題時還是力不從心。如果想做一款完善的產(chǎn)品,廠家還得把開源算法存在的一些不好的問題給處理清楚。下面,我給大家舉一個例子:
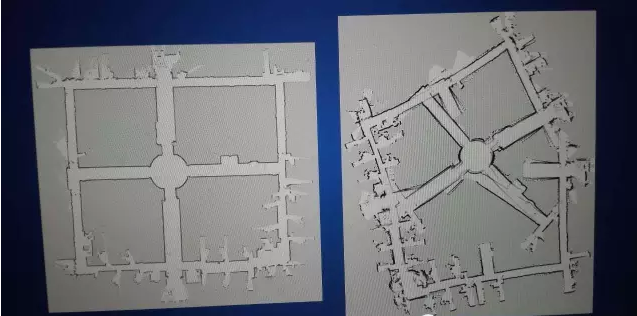
以上展示了兩張地圖,你會發(fā)現(xiàn)右邊這張地圖,它算是固件失敗,比如說它里邊明明是一個可以拼接在一起的走廊,但卻變成了一個非常扭曲的效果。這也是現(xiàn)在很多非商用的SLAM系統(tǒng)具備的特性,就是對于這種相對比較復(fù)雜的場景,它可能存在地圖不閉合,或者缺乏回環(huán)檢測的功能。這也是SLAM系統(tǒng)在進(jìn)行實用化亟待解決的本質(zhì)問題。如果說使用的是商用系統(tǒng),采用這種SLAM的開源方案,就必須得有廠家自行研發(fā)和解決。
2.從傳統(tǒng)上來說,SLAM系統(tǒng)需要有強大的處理器來進(jìn)行工作。比如現(xiàn)在跑一個SLAM,它需要有上G赫茲或者多核幾核甚至用筆記本來完成。所以這導(dǎo)致了一個問題:功耗、體積和成本變得很高。
3.SLAM算法在使用上還需要用到其他的傳感器。這樣一來,研究設(shè)計一個機器人在使用SLAM系統(tǒng)時就會存在多種耦合性。這些耦合性將導(dǎo)致研發(fā)和核心技術(shù)變得非常困難。所以說有了激光雷達(dá)再借助一個主板并不能解決事情。
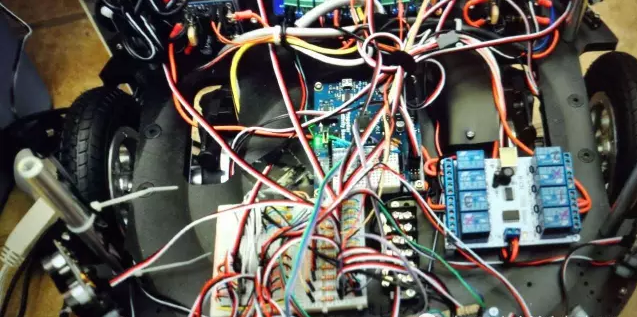
這張圖展現(xiàn)的就是一個例子:一個機器人,如果它要用SLAM算法,就會發(fā)現(xiàn)會為它配備很多不同的傳感器,還有幾個對應(yīng)的處理系統(tǒng),而把這些東西錯綜復(fù)雜聯(lián)接在一起就會使得這個機器人在研發(fā)上具有很強的耦合性,同時也會造成研發(fā)的難度加大。所以在解決這件事情上,它有很多種方法。思嵐科技的探索的就是把這三個系統(tǒng)變成一個標(biāo)準(zhǔn)模塊,結(jié)果就是可以讓用戶在使用SLAM的時候變得比較容易,用戶使用這一模塊就可以和激光雷達(dá)進(jìn)行連接,它的外部有一個接口,可以讓機器人較快地使用到。
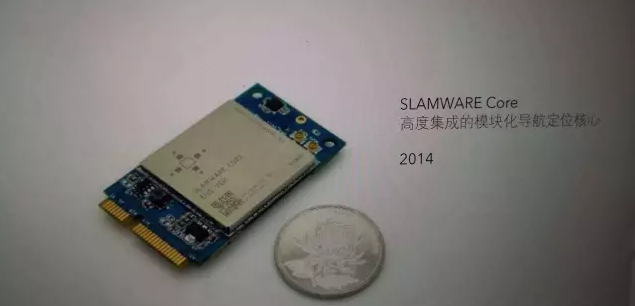
上圖就是我們思嵐科技的模塊化的SLAM導(dǎo)航定位系統(tǒng)。它里面包含了對SLAM本身的處理以及前面提到的路徑規(guī)劃的能力。甚至說掃地機器人對應(yīng)的一些功能,也都集合在當(dāng)中。
這樣做的好處是,在有了激光雷達(dá)以后,對應(yīng)的機器人在SLAM和導(dǎo)航定位能力的便捷程度上提高了一個等級。當(dāng)時我們在做這個模塊化的SLAM系統(tǒng)時,曾經(jīng)把激光雷達(dá)和導(dǎo)航定位系統(tǒng)和一個平衡車進(jìn)行對接,大概用了幾天的時間,這個平衡車就具有了無人駕駛的能力。
總結(jié)來說,首先激光雷達(dá)它本身并不是一個具有SLAM和導(dǎo)航定位能力的傳感器,你必須得為它去研發(fā)或配備對應(yīng)的模塊或者算法,來使得它具有這樣的功能。這也是為什么缺乏這樣的解決方案,光有低成本的激光雷達(dá),它并不能夠使得導(dǎo)航定位的能力被機器人廣泛使用,這是一個本質(zhì)的原因。




















